■드론 택시 나오려면 ‘자율 비행’ 필수
21일 문형필 성균관대 기계공학부 교수가 삼성 뉴스룸에 올린 기고글에 따르면 드론택시가 현실화되려면 무엇보다 자율비행이 가능해져야 한다. 문 교수는 "드론에 탑재된 센서만 활용해 실내외 환경을 스스로 인식하며 비행하는 기술은 전 세계적으로 활발하게 개발 중"이라며 "드론 자율 비행 기술은 위치기반서비스(GPS)를 기반으로 하지 않고, 드론에 장착된 각종 센서로 환경을 인식하고, 경로를 스스로 만든 후 장애물을 피해 원하는 목표 지점까지 비행한다"고 설명했다.
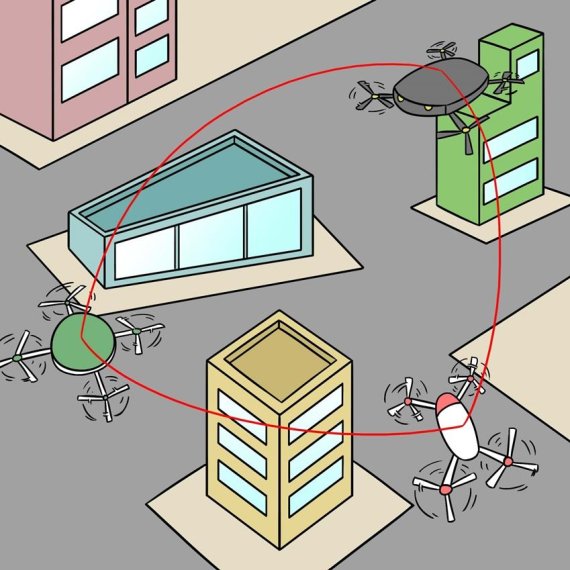
이런 기술이 실제로 구현 가능하려면 크게 세 가지 기술이 필요하다. △주변 장애물과 드론의 상대적 위치를 인식하는 환경인식 기술 △GPS 없이 스스로의 동작과 위치를 인식하는 위치추정 기술 △목표 지점까지의 비행 경로를 생성, 이를 추종해 비행하는 제어 기술이다. 드론이 안전하게 비행하려면 3차원 장애물을 스스로 인식하고 피하는 건 물론, 목적지를 향해 이동하는 동안 자기 위치나 자세도 인식해야 하기 때문이다.
■카메라 센서·AI 등으로 거리 정밀 측정
GPS 없이 드론의 위치나 동작을 알아내는 기술은 오늘날 가장 활발히 연구되는 분야 중 하나다. 한 대의 카메라를 활용하는 ‘모노큘러비전슬램(monocular vision SLAM)’이 대표적이다. 문 교수는 "이 기술의 핵심은 한 장소에서 획득한 이미지와 이동 후 획득한 이미지 간 공통점을 아주 빠르게 찾아내는 것"이라며 "이때 공통되는 부분이 (고정된) 물체라면 그 변화에서부터 드론(카메라)의 이동 속도를 계산할 수 있다"고 말했다.
이처럼 ‘이미지 간 동일 지점의 지속 추적 기술’은 카메라로 물체를 인식하고 인식된 물체 위치를 추정하는 기본이다. 그 과정에서 흑백 정도나 주변 픽셀과의 차이 등 이미지의 국부적 특징이 활용된다. 다만 카메라로 얻은 이미지는 빛의 조건에 굉장히 민감하기 때문에 빛이 부족한 밤 시간대엔 사용하기 어려운 한계가 있다.
마지막으로, 경로계획(path plan)이나 작동제어 관련 기술이다. 경로계획은 전역경로계획과 지역경로계획으로 나뉜다. 전역경로계획은 ‘현 위치에서 목표 지점까지 어떻게 이동할지에 대한 고민’이며, 지역경로계획은 ‘바로 앞 장애물을 어떻게 피해갈지에 대한 고민’이라고 분류할 수 있다.
전역경로계획에선 출발 시점에 주어지는 정보를 활용, 현재 위치에서 목표 위치까지 이동할 방법을 찾는다. 문 교수는 "전역경로계획은 주로 인공지능(AI)이 적용되며 굉장히 많은 풀이가 존재한다"며 "일단 경로가 생성되더라도 드론이 이동하는 도중 환경 상태가 바뀔 수 있는데, 이를 실시간으로 반영해 원하는 경로를 효율적으로 찾아내야 한다"고 전했다. 이어 "반면, 지역경로계획은 실제 드론 동작을 기반으로 가까운 장애물을 회피하며 비행할 수 있도록 설계하는 게 관건"이라며 "제아무리 예쁘게 만들어진 경로도 드론이 그걸 제대로 추종할 수 없다면 곤란하기 때문"이라고 덧붙였다.
문 교수는 "드론이 비행 도중 실시간으로 장애물을 인식하고 그 정보를 활용, 비행 경로를 생성하며 정확히 제어하는 기술은 세계 각국에서 활발하게 연구 중"이라며 "이런 기술이 무르익을 수만 있다면 ‘도심 드론 비행’도 먼 미래 일만은 아닐 것"이라고 내다봤다.
cgapc@fnnews.com 최갑천 기자
※ 저작권자 ⓒ 파이낸셜뉴스, 무단전재-재배포 금지