GIST, 무중력 자율비행로봇 데이터셋 최초 공개
국제우주정거장서 NASA의 '애스트로비' 활용
우주로봇용 자율항법 알고리즘 개발 위한 기술
국제우주정거장서 NASA의 '애스트로비' 활용
우주로봇용 자율항법 알고리즘 개발 위한 기술
[파이낸셜뉴스] 광주과학기술원(GIST) 기계공학부 김표진 교수팀이 미국 항공우주국(NASA)과 협력해 무중력 환경에서 활동하는 자율비행 로봇 '애스트로비(Astrobee)'로부터 수집된 센서 데이터의 통합 데이터셋을 개발했다. 이 데이터셋을 이용해 만든 항법 알고리즘을 테스트한 결과, 애스트로비가 국제우주정거장 안에서 안정적이고 정확하게 이동했다.
15일 GIST에 따르면, 연구진은 이번에 공개된 데이터셋은 NASA 에임스 연구 센터와 함께 기존에 접근하기 어려웠던 국제우주정거장 내에서 측정 및 수집된 센서 데이터를 통합 및 배포하고 우주 기반 자율비행 기술 연구를 수행했다.
김표진 교수는 "이번에 개발된 데이터셋과 실험 결과를 기반으로 우주비행사와 신속하고 정확한 협력이 가능한 자율항법 알고리즘을 개발하는 것이 최종 목표"라고 말했다.
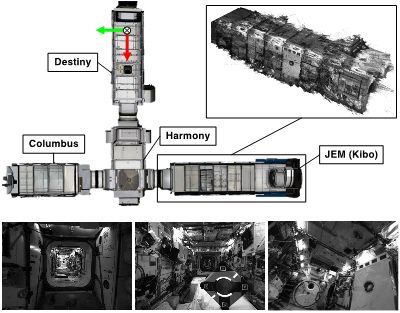
애스트로비는 우주비행사를 도와 자율 운영 또는 원격 조종을 통해 우주정거장 내 소음 측정, 실험 기록, 화물 이동 등과 같은 다양한 작업을 수행한다. 이때 국제우주정거장 내에서 로봇이 자신의 위치를 파악하며 자율비행을 할 수 있는 카메라 영상을 이용한 위치 측정 및 맵핑(Visual SLAM)기술이 필수적이다.
무중력 환경인 우주 공간은 로봇이 모든 방향으로 자유롭게 움직이고 회전할 수 있을 뿐만 아니라 빛의 변화나 떠다니는 물체의 방해로 로봇이 주변을 인지하고 위치를 파악하는 데 어려움을 겪는다. 따라서 우주선 내 장애물과 변화에도 로봇의 안정적인 자율비행 연구를 위해 이러한 공간적 특성이 반영된 다양한 시나리오에서 데이터셋을 취득하는 것이 필수적이다.
하지만 국제우주정거장 내부에서 활용할 수 있는 안정적인 항법 기술의 연구개발에는 데이터와 자원이 부족하다는 한계가 있으며, 특히 국내 연구 환경은 무중력 상태에서 로봇을 연구할 수 있는 플랫폼의 부족, 국제우주정거장에 대한 접근 제한이라는 이중 도전에 직면해 있다.
연구진이 개발한 애스트로비 데이터셋은 무중력 환경에서 발생할 수 있는 다양한 시나리오를 포함한다. '자유 비행(Free Flight)', '교정(Calibration)', '차량 내부 활동(Intra Vehicular Activity)', '시험과 오류 수정(Test and Debugging)' 등으로 구성된 4가지 카테고리를 통해 총 23개의 데이터셋을 공개했다.
이는 간단한 회전과 주행부터 극단적인 회전, 주변 탐색 등 실제 임무 수행 중 얻은 데이터를 포함하며, 자율비행 실험과 성능 평가에 필요한 모든 센서 정보를 통합해 제공한다.
나아가 연구진은 애스트로비로부터 수집된 데이터를 활용해 무중력 우주 환경에서 적합한 항법 알고리즘을 평가했다. 총 여섯 가지 최신 위치 측위 알고리즘들을 이용한 벤치마크를 통해 비교실험한 결과, 대부분의 시나리오에서 기하학 기반의 알고리즘이 안정적이고 정확한 성능을 보였다.
김 교수는 "실제 국제우주정거장에서 얻어진 다양한 데이터셋과 자율항법 실험 결과를 통해 향후 우주 임무를 위한 더 효율적이고 안정적인 항법 시스템 개발에 대한 방향성을 제공했다"며 "이 데이터셋이 관련 3D 컴퓨터 비전 및 로보틱스 연구 분야에 등 다양한 연구 방향을 제시할 것"이라고 말했다.
한편, 연구진은 이 데이터셋을 인터넷에 공개해 놓은 상태로 관심 있는 사람은 누구나 다운받을 수 있게 했다. 또한 이번 연구 결과를 미국 전기 전자 학회(IEEE)가 발간하는 로보틱스 분야 상위 30% 저널인 'IEEE 로봇 및 자동화 레터(IEEE RA-L)'에 발표했다.
monarch@fnnews.com 김만기 기자
※ 저작권자 ⓒ 파이낸셜뉴스, 무단전재-재배포 금지