KAIST, 생체모방형 몰봇 개발
한국과학기술원(KAIST)은 전기및전자공학부 명현 교수 연구팀이 일명 두더지 로봇인 '몰봇(Mole-bot)'을 개발했다고 4일 밝혔다. 몰봇은 메탄가스나 전자기기에 이용되는 희토류 등이 매설된 지역의 탐사, 더 나아가 극한지역 또는 우주 행성의 표본 채취를 목표로 KAIST 연구팀에 의해 개발됐다.
몰봇은 한국산업기술시험원(KTL)에서 공인인증 평가를 통해 총 4개 항목에서 성능을 검증했다.
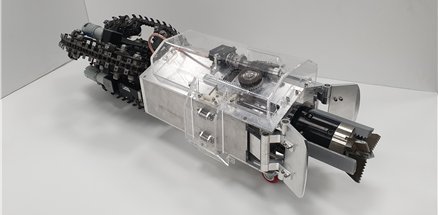
몰봇은 크게 드릴링부, 잔해 제거부, 방향전환을 위한 허리부, 그리고 이동 및 고정부로 구성된다. 크기는 지름 25㎝, 길이 84㎝이며, 무게는 26㎏이다.
명현 교수는 "몰봇이 기존 로봇들보다 훨씬 효율적인 방법으로 지하자원 탐사가 가능할뿐만 아니라 경제성도 뛰어나다"고 말했다. 또한 명 교수는 "최근 스페이스X에 의해 촉발된 우주 개발 등 다양한 분야에 적용이 가능하기 때문에 세계시장 진출도 가능할 것"이라고 전망했다.

허리부는 두더지처럼 땅속에서 360도 자유롭게 방향 전환이 가능하다. 또 이동부는 동일한 3개의 유닛을 삼각형 형태(120도 간격)로 균등 배치해 땅 속에서 안정적으로 이동을 할 수 있도록 설계됐다. 불규칙한 토양 환경, 암석 등 예측 불가능한 땅속에서 안정적 이동을 위해 무한궤도를 적용했다.
연구팀은 이 밖에 로봇의 위치를 측정할 수 있는 센서시스템과 알고리즘을 탑재했다. 몰봇에 자기장 센서가 포함된 관성항법 센서를 탑재해 지구 자기장 데이터 변화로 로봇 위치를 인식할 수 있다. 이를 통해 지하공간에서의 3차원적인 자율 주행을 가능케한다.
이 연구는 2017년부터 2019년까지 진행됐으며, 로봇 구조 해석 및 지반 실험은 건설 및 환경공학과 홍정욱 교수 및 권태혁 교수 연구팀과 협업했다.
monarch@fnnews.com 김만기 기자
※ 저작권자 ⓒ 파이낸셜뉴스, 무단전재-재배포 금지