보행자 등 다양한 도로 조건 반영한 설계 방향 제시

[광주=뉴시스]이창우 기자 = 광주과학기술원(GIST)은 AI융합학과 김승준 교수 연구팀이 자율주행차가 도로 이용자에게 양보 대상과 시점, 위치까지 명확히 전달하는 새로운 외부 인간-기계 인터페이스(eHMI) 기술을 개발했다고 15일 밝혔다.
이번 연구는 보행자만을 가정한 기존 연구의 한계를 넘어 보행자·자전거 이용자·일반 운전자가 동시에 존재하는 실제 도로 환경을 가상현실(VR)로 구현해 자율주행차와의 소통 방식을 검증한 것이 특징이다.
완전 자율주행 시대에는 운전자의 눈 맞춤이나 손짓 같은 비언어적 소통이 사라지는 만큼 차량 외부에서 자율주행차의 의도를 명확히 전달하는 eHMI 기술이 필수적이다.
그러나 다중 이용자가 존재하는 상황에서는 자율주행차가 누구에게, 언제, 어디서 양보하는지 전달하지 못해 혼란과 위험이 발생할 수 있다는 지적이 제기돼 왔다.
연구팀은 이러한 문제 해결을 위해 맥락 정보를 포함한 eHMI 설계 방향을 제안했다.
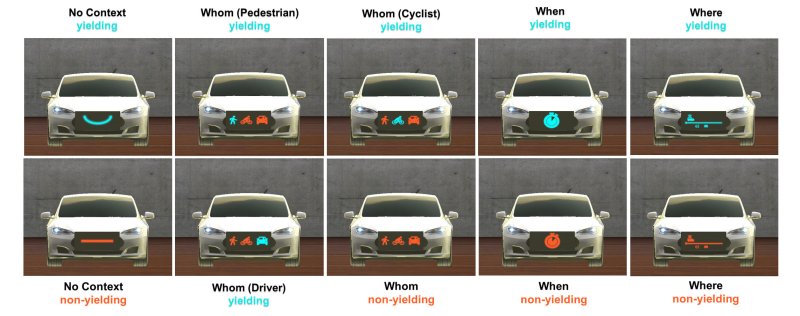
실험에서는 신호 없음, 단순 양보 표시, 양보 대상(Whom), 정지 시점(When), 정지 위치(Where) 등 다섯 가지 신호 방식을 비교했다.
모든 신호는 기존 교통신호와 혼동되지 않도록 별도의 색상과 심벌로 설계했다.
실험에는 보행자, 자전거 이용자, 운전자 등 42명이 참여했으며 각 참여자는 VR 헤드셋, 자전거 시뮬레이터, 차량 시뮬레이터를 통해 동일한 가상 도로 환경에서 자율주행차와 상호작용했다.
연구 결과 '누구에게 양보하는지'를 알려주는 '대상 정보(Whom)' 신호가 가장 빠르고 안정적인 의사결정을 유도해 안전감과 신뢰도, 명확성 등 모든 지표에서 가장 우수한 성능을 보였다.
반면 신호가 없는 경우는 가장 낮은 평가를 받았고 단순 양보 표시만 제공하는 방식은 혼란을 줄이는 데 한계가 있었다.
시점(When)과 위치(Where) 정보를 제공한 신호 역시 신뢰도와 안전성을 높이는 효과를 보였으며 잘못된 해석으로 이어진 사례는 한 차례도 발생하지 않았다.
생체신호 분석에서도 대상 정보 신호 제공 시 참가자들의 심리적 긴장이 감소하는 경향이 확인됐다.
김승준 교수는 "다중 교통 주체가 동시에 존재하는 실제 도로 환경을 VR에서 구현하고 eHMI의 효과를 검증한 연구는 세계적으로도 드문 사례"라며 "자율주행차가 '양보한다'는 사실뿐 아니라 '누구에게·언제·어디에서 양보하는지'까지 명확하게 전달하는 것이 미래교통 안전의 핵심이 될 것"이라고 강조했다.
이번 연구 결과는 지난 9월 유비쿼터스·웨어러블 컴퓨팅 분야의 최신 연구를 다루는 ACM 논문집(PACM) IMWUT에 게재됐다. 향후 자율주행 기술 고도화와 스마트 교차로 교통약자 보호 시스템 개발 등으로 연구가 확장될 예정이다.
기술이전 관련 협의는 GIST 기술사업화센터로 문의하면 된다.
☞공감언론 뉴시스 lcw@newsis.com <저작권자ⓒ 공감언론 뉴시스통신사. 무단전재-재배포 금지.>
저작권자ⓒ 공감언론 뉴시스통신사. 무단전재-재배포 금지