(서울=뉴스1) 이재상 기자 = 실내 위치 제어 기술 전문 기업 HOP(에이치오피)가 롯데건설이 수행 중인 롯데백화점 리뉴얼 공사 현장에서 무인 순찰 로봇 시연을 성공적으로 진행했다고 15일 밝혔다.
이번 시연은 LiDAR(라이다)와 Stereo Vision(스테레오 비전) 센서를 전혀 사용하지 않고, HOP(에이치오피)가 자체 개발한 측위 시스템 'CereVellum(세레벨륨)'만을 활용해 자율 이동과 순찰을 구현했다는 점에서 기존 건설·리테일 현장 로봇 적용 방식과 뚜렷한 차별성을 보였다.
이번 실증은 영업 시설과 맞닿아 있어 구조 변경이 잦고, 가설물과 자재가 수시로 이동하는 실내 리뉴얼 공사 환경에서 진행됐다.
해당 환경은 GPS 수신이 불가능할 뿐 아니라, 조도 변화, 분진, 반사체 등으로 인해 카메라 기반 인식이나 고가의 LiDAR 센서가 안정적으로 동작하기 어려운 조건을 갖고 있다. HOP(에이치오피)은 이러한 제약을 전제로, 시각 인식 센서에 의존하지 않는 실내 측위 기반 자율 순찰의 가능성을 검증하는 데 초점을 맞췄다.
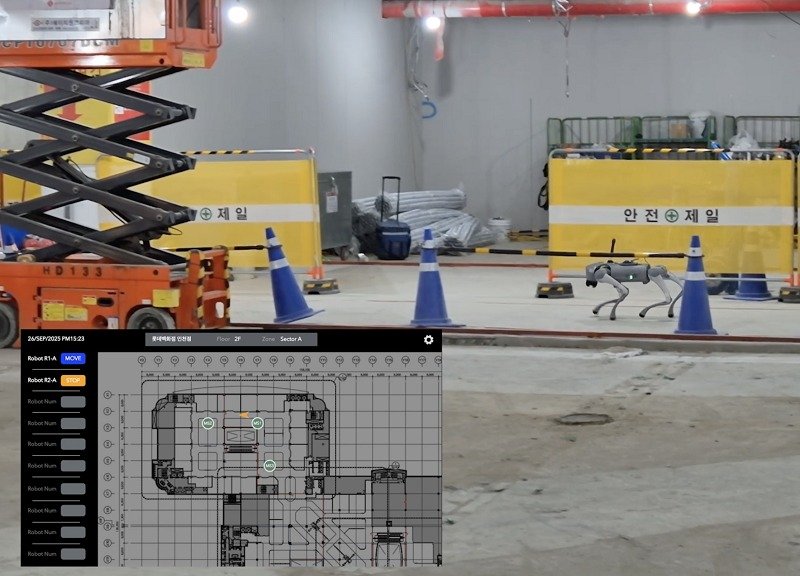
시연에 투입된 로봇은 CereVellum(세레벨륨)을 통해 자신의 위치를 실시간으로 인지하며, 사전에 설정된 순찰 경로를 따라 공사 구역을 무인으로 이동했다.
로봇의 위치 정보는 관제 시스템에 즉시 공유돼 관리자가 원격에서 순찰 진행 상황을 확인할 수 있었으며, 특정 구역 체류 시간, 이동 경로 이탈 여부 등도 함께 기록됐다. 이를 통해 야간 무인 순찰, 공정 중 안전 확인, 출입 통제 보조 등 다양한 활용 가능성이 제시됐다.
특히 이번 시연은 LiDAR(라이다)·Stereo Vision(스테레오 비전) 없이도 실내 자율주행이 가능하다는 점을 현장에서 직접 입증했다는 데 의미가 크다.
일반적으로 실내 자율주행 로봇은 고가의 센서 구성과 복잡한 환경 인식 알고리즘이 필요하지만, HOP(에이치오피)은 전파 기반 측위 기술만으로 위치 인식과 이동 제어를 수행함으로써 시스템 구성의 단순화와 비용 절감 가능성을 동시에 보여줬다. 이는 대규모 리뉴얼 현장이나 다수 로봇을 운영해야 하는 환경에서 특히 중요한 요소로 평가된다.
롯데건설 관계자는 "백화점 리뉴얼 공사는 일반 건설 현장과 달리 동선 제약과 안전 관리 요구 수준이 높다"며 "이번 시연은 센서 의존도를 낮추면서도 실내 위치 정확도를 확보할 수 있는 새로운 방식으로, 향후 현장 안전관리와 무인 순찰 적용 가능성을 충분히 검토할 수 있는 계기가 됐다"고 말했다.
HOP(에이치오피) 측은 "이번 실증은 '측위 시스템만으로 구현 가능한 실내 무인 순찰'의 실효성을 검증한 사례"라며 "앞으로 건설 현장뿐 아니라 대형 상업시설, 병원, 데이터센터, 복합 업무시설 등 GPS가 닿지 않는 실내 공간 전반으로 적용 범위를 확대해 나갈 계획"이라고 밝혔다.
이번 시연은 실내 공사 현장의 무인화·자동화 전환을 앞당기는 기술적 이정표로 평가되며, 건설과 유통 산업 전반에서의 스마트 운영 모델 확산에 기여할 것으로 기대된다.
한편 우수한 아이디어와 기술력을 인정받은 HOP(에이치오피)은 국민대학교 캠퍼스타운에 입주해 다양한 성장 지원을 받았다.
국민대학교 캠퍼스타운은 입주기업의 단계별 성장을 위해 교육, 멘토링, 투자·판로 연계, 언론 홍보까지 이어지는 맞춤형 프로그램을 운영하고 있으며, 내년에는 보다 고도화된 창업형 사업을 통해 실질적인 매출·투자 성과를 창출하는 스타트업을 집중적으로 육성할 계획이다.
※ 저작권자 ⓒ 뉴스1코리아, 무단전재-재배포 금지