[파이낸셜뉴스] 광주과학기술원(GIST)은 AI융합학과 이규빈 교수(인공지능연구소장) 연구팀이 사람이 물체를 만질 때 느끼는 힘의 감각까지 학습해 정밀한 작업을 수행할 수 있는 인공지능(AI) 기술을 개발했다고 10일 밝혔다.
이 기술은 사람이 작업할 때 눈으로 보는 정보뿐 아니라 손끝에서 느끼는 힘과 접촉 감각까지 함께 학습하도록 한 것이 특징이다. 연구팀은 이를 위해 ‘손힘 측정 장치(ManipForce)’와 ‘주파수 인식 속도-감각 통합 AI 모델(Frequency-Aware Multimodal Transformer, FMT)’을 함께 개발했다.
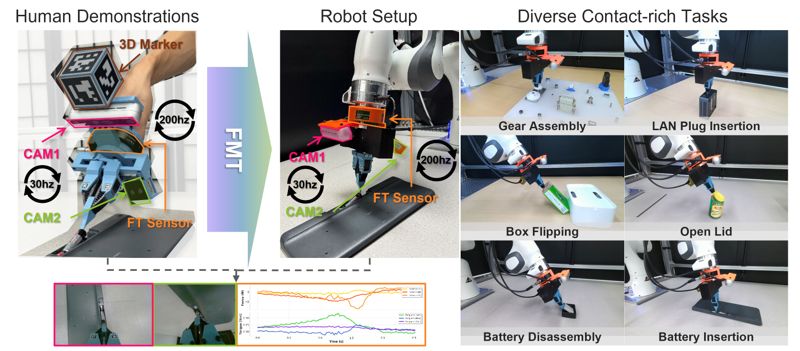
연구팀은 사람이 작업 과정에서 자연스럽게 느끼는 ‘힘의 감각’까지 로봇 학습에 활용하는 방법에 주목했다. 연구팀이 개발한 ‘손힘 측정 장치(ManipForce)’는 사람이 직접 손으로 작업하는 모습을 그대로 기록하면서 △두 대의 카메라로 촬영한 작업 영상 △손목에 달린 센서로 측정한 힘과 회전력(Force-Torque) △손의 움직임과 위치 정보 등을 동시에 수집한다.
이 장치는 로봇을 원격으로 조작하는 방식이 아니라 사람이 직접 손으로 물체를 조작하는 자연스러운 동작을 그대로 기록할 수 있다는 점에서도 기존 데이터 수집 방식과 차별화된다.
연구팀은 영상과 힘 데이터의 기록 속도가 서로 다르다는 문제를 해결하기 위해 ‘주파수 인식 속도-감각 통합 AI 모델(Frequency-Aware Multimodal Transformer, FMT)’도 함께 개발했다.
이를 통해 로봇은 물체의 위치와 접촉 상황을 동시에 이해하고 접촉이 많은 정밀 조작 작업에서도 더 안정적인 동작을 수행할 수 있다.
연구팀은 기어 조립과 박스 뒤집기, 배터리 삽입, 인터넷 케이블 플러그 연결에 이어 뚜껑 열기, 배터리 분리 등 6가지 작업을 실제 로봇 실험으로 검증했다. 각 작업을 20회씩 수행한 결과, 평균 성공률은 약 83%를 기록했다.
이규빈 교수는 “이번 연구는 카메라 영상에만 의존하던 기존 로봇 학습 방식의 한계를 극복하고, 힘 감각 데이터를 효과적으로 활용할 수 있는 새로운 AI 학습 프레임워크를 제시한 것”이라며, “향후 제조 현장의 부품 조립이나 커넥터 체결뿐만 아니라 가정 환경에서의 배터리 교체나 전자기기 부품 조립 등 섬세한 힘 제어가 필요한 다양한 분야에서 로봇 활용을 한 단계 도약시킬 수 있을 것으로 기대한다”고 말했다.
연구 결과는 국제 학술 서버 ‘arXiv’에 2025년 9월 23일 사전 공개됐으며, 로봇공학 분야의 권위 있는 학술대회 'IEEE International Conference on Robotics and Automation(ICRA 2026)'에서 발표될 예정이다. ICRA 2026은 오는 6월 1일부터 5일까지 오스트리아 빈에서 개최된다.
한편 GIST는 이번 연구 성과가 학술적 의의와 함께 산업적 응용 가능성까지 고려한 것으로, 기술이전 관련 협의는 기술사업화실을 통해 진행할 수 있다고 밝혔다.
jiany@fnnews.com 연지안 기자
※ 저작권자 ⓒ 파이낸셜뉴스, 무단전재-재배포 금지